Derivation Of Equation Of Motion For Undamped SDOF System

Table of Contents
Derivation Of Equation Of Motion For Undamped SDOF System, The governing differential equation describing the motion is known as the equation of motion.
There are various methods to derive the equation of motion of a vibratory system. The following are the important methods:
- Simple Harmonic Motion method
- Newton’s method
- Energy method
- Rayleigh’s method
- D’Alembert’s principle
Simple Harmonic Motion Method For Undamped SDOF
For a particle in a rectilinear motion, if its acceleration is always proportional to the distance of the particle from a fixed point on the path and is directed toward the fixed point, then the particle is said to have SHM. The most basic type of periodic motion is called SHM. SHM is expressed in differential equation form as
\ddot{x}\: \ltimes\: -x ---(1)
where x is the rectilinear displacement.
\frac{\text{d}x}{\text{d}t}= \dot{x} is known as velocity of the particle.
\frac{\text{d}^2x}{\text{d}t^2}= \ddot{x} is known as acceleration of the motion.
The -ve sign in Eq. (1) indicates the direction of motion of a particle towards a fixed point which is opposite to the direction of motion Let the constant of proportionality be a, which is an unknown parameter.
\ddot{x} = -{\omega_n}^2x
\ddot{x} + {\omega_n}^2x = 0 ---(2)
This is known as the equation of motion. This is a second-order linear differential equation. The constant \omega_n , is yet to be determined by the analysis.
Newton’s Method for Undamped SDOF

The equation of motion is just another form of Newton’s second law of motion which states that “the rate of momentum change occurs in the direction of the applied force and is proportionate to the impressed forces.”.
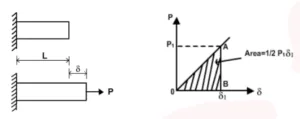
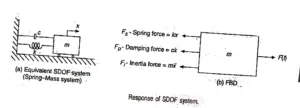
Consider a spring-mass system (Fig)which is assumed to move only along the vertical direction. It has only one degree of freedom because its motion is described by a single coordinate x. (Fig) depicts a massless spring with a constant stiffness, or spring factor k. Stiffness is meant when one speaks about the “load required to produce unit deformation”. It can be stated mathematically as
k=\frac{w}{\triangle}
where {\triangle} is the static deflection of the spring. After attaching a load w to the spring as in Fig, the spring elongates or displaces from its equilibrium position vertically downwards. This position is called as “equilibrium position”
w={k}{\triangle}
A force is applied to pull the load w slightly below from the equilibrium position, and then the pulling force is removed. The load w will continue to execute vibrations up and down which is called as free vibration.
Restoring force in X direction = w -{k}({\triangle}+x)
=w -{k}{\triangle}-kx
we know that from Eq w={k}{\triangle}
={k}{\triangle} -{k}{\triangle}-kx
-kx
According to Newton’s law
m \ddot{x} = -kx
m \ddot{x} + kx =0
Compared with eq
\ddot{x} + {w_n}^2 x =0
{\omega_n}^2 = \frac{k}{m}
{\omega_n} = \sqrt{\frac{k}{m}} = \sqrt{\frac{N/m}{kg}}
=\sqrt{\frac{\frac{kg.m/s^2}{m}}{kg}} = \sqrt{\frac{1}{s^2}} = \frac{1}{s}
The constant of proportionality {\omega_n} is known as the natural frequency or Angular velocity. It is measured in rad/s.
Energy method For Undamped SDOF
In this method, it is assumed that the system is to be a conservative one. In a conservative system, the total sum of the energy is constant at all times. For an undamped system, since there is no friction or damping force, the total energy of the system is partly potential and partly kinetic. According to the law of conservation of energy,
Total energy = Constant
i.e. KE + PE = Constant
where KE is kinetic energy and PE is potential energy, The time rate of change of total energy will be zero.
\frac{d}{dt} (KE+PE)=0
Kinetic and potential energies for systems shown in Figure are given by
KE= \frac{1}{2}mv^2 = \frac{1}{2}mx^2 ,
PE= \frac{1}{2}kx^2 ,
\frac{d}{dt}(\frac{1}{2}m \dot{x}^2 + \frac{1}{2}kx^2) =0 ,
\frac{1}{2}m \times 2\dot{x} \times \ddot{x} + \frac{1}{2}k\times 2x \times \dot{x} =0 ,
m\ddot{x} \dot{x} +kx\dot{x}=0 ,
m\ddot{x} +kx=0
This is the same eq as obtained by Newton’s Method
Rayleigh’s method For Undamped SDOF
In this method, it is assumed that the maximum KE at the equilibrium position is equal to the maximum potential energy at the extreme position. Since SHM is presumed to constitute the motion,
x=A \sin \omega_n t
where x is the displacement of the system from its mean position after time t, and A is the maximum
displacement of the system from the equilibrium position to the extreme position. y is maximum when \sin \omega_n = 1 ,
x_{max}=A
Differentiating Eg. w.rt time, we get velocity
\dot{x}= \omega_n Acos{\omega}_{n}t ,
Velocity \dot{x} is maximum only when \cos \omega_n t=1
x_{max}=\omega_{n}A
So, maximum KE at the equilibrium position = \frac{1}{2}m \dot{x}^2_{max}
= \frac{1}{2}m (\omega_n A)^2 —(a)
Maximum PE at the extreme position = \frac{1}{2} k {x}^2_{max}
(PE)_{max} = \frac{1}{2}kA^2 —(b)
Equating Eqs (a) and (b), we get
= \frac{1}{2}m \omega^2_n A^2 = \frac{1}{2} k {A}^2
\omega^2_n = \frac{k}{m}
\omega_n = \sqrt{\frac{k}{m}}
Where \omega_n is the natural frequency of the system.
this method is used to determine the natural frequency of the system.
D’Alembert’s principle For Undamped SDOF
F= ma
F- ma=0
The equation above has the form of a force equilibrium equation, where the total of all the force terms is equal to zero. Therefore, under the action of the real force F and the imaginary force ma, the system could be said to be in equilibrium if an imaginary force equal to ma were applied to it in the opposite direction of the acceleration. The equilibrium point is referred to as dynamic equilibrium, and this hypothetical force is known as the inertia force.
D’Alembert’s principle states that a system may be in dynamic equilibrium by adding to the external forces, an imaginary force, which is commonly known as the inertia force.
According to this principle, the transformation of a problem in dynamics may be reduced to one in static. Consider a spring-mass system as in Figure

Using D’Alembert’s principle, to bring the body to a dynamic equilibrium position, the inertia force mi is to be added in the direction opposite to the direction of motion,
Equilibrium equation is \Sigma F_x =0
-m\ddot{x}- kx=0 ,
-(m\ddot{x}+ kx)=0 ,
m\ddot{x}+ kx=0 ,
\ddot{x}+\frac{k}{m}x =0 ,
{\omega_n}^2 = \frac{k}{m} ,
{\omega_n} = \sqrt{\frac{k}{m}}
Derivation Of Equation Of Motion For Undamped SDOF System
Also Read:- Characteristic of an ideal site for a Bridge
Also Read:- Hydraulic Conductivity and Transmissivity







Post Comment